Marmellata di Kiwi
Per ottenere una marmellata con i Kiwi occorrono ovviamente dei Kiwi, tanti, ma ne bastano anche meno, nel mio caso 1,8 Kg. I frutti devono essere possibilmente non trattati (BIO o simili), però tanto vanno sbucciati…
Per ottenere una marmellata con i Kiwi occorrono ovviamente dei Kiwi, tanti, ma ne bastano anche meno, nel mio caso 1,8 Kg. I frutti devono essere possibilmente non trattati (BIO o simili), però tanto vanno sbucciati…
A questo giro possiamo dire “marmellata” poichè trattasi di agrumi, nella fattispecie propriamente di arance e quindi non esiste il problema binario “confettura-marmellata”, per i programmatori if-then-else…
Per ottenere la marmellata occorrono le arance, tante. Da noi si chiamano aranci /arancio anche i frutti oltre che l’albero che li produce, ma questa è un’altra cosa. Occorrono arance NON trattate con prodotti chimici, poiché in questa ricetta si utilizzano anche le bucce.
Ho prodotto due lotti di marmellata: il primo lotto con arance di Pietrasanta, il secondo lotto con arance di Firenze (zona “di là d’Arno”).
La ricetta è stata tramandata dalla “zia Pina” che non è parente della famosa nonna della canzoncina.
Mettiamo a bollire un bel pentolone con tanta acqua. Cubatura del pentolone e quantità di acqua dipendono dal numero di arance. Pesare le arance all’inizio, per avere un’idea in seguito delle dosi di zucchero da aggiungere.
Quando l’acqua è al bollore buttare le arance intere (magari prima lavate un capellino la buccia), fate riprendere il bollore ed attendere quindi 10 minuti. Scolare quindi le arance in acqua fredda per fermare la “cottura” preliminare.
Spremere le arance con uno spremiagrumi e mettere da parte il succo filtrato dall’attrezzino. La polpa ancora umida con i semi mettetela da parte ed aggiungete anche la “parte bianca” grattandola via dall’intero delle bucce. Questa “pasta” va fatta scolare utilizzando una borsa fatta con garza o tessuto di cotone a maglie larghe. Io ho fatto questo sacchetto legandolo in testa e lasciandolo su uno scolapasta con peso a premere sopra. Il succo che esce fuori va ovviamente recuperato ed aggiunto al succo delle arance messo da parte in precedenza. Nel secondo “lotto” di produzione ho leggermente modificato la ricetta: da questa pasta ho tolto tutti i semi (circa 2 ore di tempo perché le arance amare hanno un casino di semi all’interno), ho tolto lo scarto bianco che avvolge il seme ed ho tenuto solo la pasta umida, quindi ho frullato con un mini-pimer ed ho ottenuto una crema che ho aggiunto al succo di arance.
Prendete quindi le bucce e tagliatele a strisce molto sottili (2-3 mm) e quindi a pezzetti lunghi al massimo 4-5 cm. Io non ho utilizzato tutte le bucce perché le arance che avevo erano di una varietà particolarmente amare (per la cronaca ne ho usato circa 1/6).
Mettere un’altra pentolina con acqua a bollire, quando l’acqua raggiunge il bollore buttare le strisce di buccia di arancia e far “cuocere” per altri 10 minuti. Scolare e far freddare le bucce in acqua fredda.
Prendere il succo di arance che avete messo da parte ed aggiungere acqua nel rapporto di 3 parti di succo e 2 parti di acqua. Aggiungere le striscioline di arancia.
A questo punto ho messo a bollire, ovviamente a fuoco basso, la pentola con la marmellata in divenire, dopo 2 ore di cottura ho aggiunto lo zucchero. La quantità di zucchero originale della ricetta indicava 600 grammi per ogni chilogrammo di arance pesate all’inizio del procedimento. Io non amo la marmellata molto dolce ed ho ridotto notevolmente la quantità, in pratica la metà, circa 300 grammi per chilo. Ho anche aggiunto una mela verde frullata per far raddensare il prodotto finale.
Mescolare bene lo zucchero con il “minestrone” in cottura e continuare a cuocere a fuoco lento per almeno un’altra ora e mezza.
Risultato? Ottimo. La marmellata è dolce, non troppo, con un retrogusto amarognolo che è la mia passione.
Buon assaggio…
Uso di sensori
In questa lezione vedremo come utilizzare alcuni sensori…
Iniziamo però subito con la definizione del termine: un sensore o trasduttore è un dispositivo che converte una grandezza fisica in un altro tipo di grandezza fisica (a volte è sempre la stessa). Tipicamente però quelli che interessano a noi sono quelli che “traducono” una qualsiasi grandezza fisica in una grandezza di tipo elettrico (tipicamente una tensione elettrica) poichè dobbiamo “leggerla” con un microcontrollore. In realtà in ambiente elettronico i due termini “sensore” e “trasduttore” non sono esattamente equivalenti, il primo comprende anche la circuiteria che esegue l’adattamento al circuito che dovrà misurare questa tensione.
In questa lezione utilizzeremo diversi tipi di sensore, iniziamo con un sensore di luce ambientale (nello specifico una fotoresistenza). Tecnicamente il componente è conosciuto con la sigla LDR (Light Dependent Resistor). Un esempio di componente reperibile in commercio (ad esempio presso RS) può essere il NSL-19M51.
Esercitazione 14 – Luce Scale
Con la piattaforma TinkerCad realizziamo questo circuito

Si vuole realizzare un sistema per l’illuminazione delle scale di un condominio con alcune considerazioni di risparmio energetico:
Durante la lezione abbiamo visto e risolto alcuni problemi inerenti alla temporizzazione. Il codice completo lo potete trovare qui.
Esercitazione 15 – Sistema di allarme con sensore di movimento
Un altro esempio di sensore può essere il sensore di movimento con tecnica PIR (Passive InfraRed) prodotto da Parallax ma anche da Adafruit, del quale potete trovare il datasheet a questo link.
Con la piattaforma TinkerCad realizziamo questo circuito

Si vuole realizzare un semplice sistema di allarme, basato su di un sensore di movimento, che abbia queste caratteristiche:
Durante la lezione abbiamo visto, passo-passo, come implementare tramite il software una dopo l’altra le richieste del cliente. La procedura consigliata è, sempre, quella di testare una funzione dopo l’altra, verificando ad ogni nuova aggiunta il corretto funzionamento di tutto il programma.
In effetti, nel collaudo finale, ci siamo accorti di una anomalia dovuta ad un caso non previsto nell’elencazione iniziale delle caratteristiche: se viene rilevato l’inizio di un movimento, correttamente si accende la spia gialla, correttamente si incrementa il conteggio dei preallarmi, ma, se il movimento è continuo nel tempo succede che non si attiverà mai la segnalazione di allarme.
Il problema è stato isolato utilizzando il metodo di debug del funzionamento tramite la comunicazione seriale: stampiamo sulla seriale le informazioni che necessitano per verificare cosa sta succedendo all’interno del microcontrollore. Questa è una tecnica molto usata nella fase di sviluppo e di collaudo finale del programma. Abbiamo anche visto come, tramite dei semplici #define, attivare/disattivare questa funzionalità di debug.
Abbiamo quindi aggiunto un’ulteriore variabile che memorizza l’istante in cui viene “visto” il primo movimento e, se esso non cessa, dopo 10 secondi di movimento continuativo, viene comunque attivato l’allarme.
Il programma definitivo lo trovate qui.
Riepilogo dei contenuti della lezione:
Alla prossima lezione…
Uso di un display LCD
In questa lezione vedremo come utilizzare un display LCD per le nostre applicazioni. A differenza delle precedenti lezioni, in cui veniva utilizzato un display a 7 segmenti, molto più limitato potendo visualizzare solo le cifre ed alcune lettere, questa volta utilizzeremo un componente che vi permetterà di visualizzare molte più informazioni ed in modo più dettagliato. Il display a caratteri oramai universalmente utilizzato è quello basato sul chip HITACHI HD-44780 e permette di governare display a 1, 2 o 4 righe, da 10, 12, 16, 20, 24 fino a 40 colonne.
Il modello da noi utilizzato è quello 16×2 (2 righe di 16 caratteri) che si trova anche come modello nell’ambiente TinkerCad.

Nelle interfacce “bordo macchina” delle schede che governano macchine complesse sono sempre presenti dei display, a volte di tipo “carattere” come quello che utilizzeremo oggi, ma molto più spesso di tipo “grafico”.
Esercitazione 10: Uso del display LCD
Con la piattaforma TinkerCad realizziamo questo circuito

Si vuole realizzare un controllo che piloti l’accensione temporizzata di un motore:
Richieste aggiuntive:
Durante la lezione abbiamo incontrato diversi problemi a cui abbiamo posto soluzione, ricordiamone alcuni:
Lavorando con temporizzazioni espresse in decimi di secondo avevamo utilizzato numeri interi, il cui uso in linguaggio C è notevolmente più veloce. Dovendo però rappresentare tali tempi in una interfaccia destinata ad “umani” avevamo il problema di rappresentare tale tempo in secondi e frazioni di esso.

Abbiamo inoltre utilizzato variabili aggiuntive per permettere la messa in pausa della temporizzazione ed anche il temporaneo spengimento del motore.
Abbiamo utilizzato un controllo ( IF ) per determinare la funzionalità del pulsante di START che, una volta partita la temporizzazione, doveva modificare il suo comportamento.
Il programma terminato e completo in tutte le sue funzionalità lo trovate qui.
Il display utilizzato permette di visualizzare tutto il set di caratteri maiuscolo/minuscolo, numerico e segni di interpunzione delle lingue occidentali, alcuni caratteri dell’alfabeto greco ed anche un set di caratteri giapponese.

Riepilogo dei contenuti della lezione:
Alla prossima lezione…
La “scoperta dell’acqua calda”
In questa quarta lezione passiamo ad usare metodi volti a NON “dover riscoprire sempre l’acqua calda”…
Scrivendo un codice, dopo averlo collaudato e verificato il corretto funzionamento, eliminandone tutti i possibili errori o problemi, non conviene mai doverlo riscrivere sempre ad ogni nuovo programma.
Questo non vuol dire semplicemente che dobbiamo usare il “copia ed incolla” che, peraltro, è utilissimo. Vuole invece dire che occorre scrivere il codice in maniera da poterlo riutilizzare anche in altri programmi con poche o nessuna modifica. Partiremo in questa lezione con un programma già scritto nella lezione precedente, vedremo che la parte che ci interessa per la gestione del display è la medesima, mentre la parte che gestisce la pressione dei pulsanti (con anti-rimbalzo) è corretta ma andrà riscritta per gestire un numero maggiore di pulsanti senza raddoppiare il numero di righe di codice necessarie.
Esercitazione 9: Uso di strutture e funzioni
Con la piattaforma TinkerCad realizziamo questo circuito

Partendo dalla base di un altro esercizio già svolto nella Lezione 3, si deve realizzare un timer con conteggio alla rovescia e quattro pulsanti: due per la impostazione del tempo di durata, un pulsante di start ed un pulsante di stop/reset.
L’uscita comanda da Arduino potrebbe essere un timer per esposizione fotografica, un timer per accensione forno per cottura, ecc. ecc.
Organizziamo però meglio il lavoro rispetto all’esercizio di partenza: mentre in esso vi erano variabili con nomi diversi per gestire la pressione dei pulsanti con controllo anti-rimbalzo adesso, raddoppiando i pulsanti, non conviene più utilizzare questo metodo.
Occorre “riutilizzare” lo stesso codice per TUTTI i pulsanti, anche per quelli che verranno eventualmente aggiunti in futuro. Senz’altro creiamo una funzione che gestisca la pressione del pulsante (stato attuale, stato precedente, tempo dell’ultima variazione, ecc.). Per poter fare questo occorre prima generare una “struttura” ad-hoc.
// Struttura che raggruppa alcune variabili per la
// gestione dell’oggetto PULSANTE
typedef struct
{
int Porta;
bool newLettura;
bool oldLettura;
unsigned long long TimeUltimaVariazione;
// Stato STABILE del pulsante
bool StatoAttuale;
bool StatoPrecedente;
} _PULS_STRUCTURE;
Praticamente con l’istruzione typedef struct creiamo un “nuovo” tipo di variabile che in realtà è un gruppo di variabili. Dal nome possiamo riconoscere più o meno quelle utilizzare nella Lezione 3.
Di seguito con la riga
_PULS_STRUCTURE Pulsante[NUM_PULSANTI];
dove NUM_PULSANTI nel nostro caso vale 4, avvisiamo il compilatore che esiste un gruppo di 4 variabili (o array) di nome Pulsante organizzate con la nuova struttura creata di nome _PULS_STRUCTURE.
Per utilizzare le variabili contenute in questa struttura utilizzeremo comandi di questo tipo: Pulsante[3].newLettura = digitalRead(..….
Dove la variabile newLettura contenuta nel gruppo Pulsante all’indice 3, verrà scritta con il contenuto dell’ingresso letto sul piedino di Arduino indicato. Attenzione al fatto che l’indice 3 indica la quarta (ed ultima in questo caso) variabile Pulsante ovvero quella che si riferisce all’ultimo pulsante sulla destra.
L’uso di queste variabili indicizzate (o array) è molto utile e ci permette di creare una sola funzione che esegue i comandi da noi forniti per tutti gli indici, anche se fossero centinaia e centinaia…
Il codice completo del programma che abbiamo visto nel corso della lezione del 21 giugno scorso lo potete trovare qui.
Riepilogo dei contenuti della lezione:
Operazioni di controllo (mascherature)
In questa terza lezione passiamo ad analizzare la parte essenzialmente di “controllo” svolta da un microcontrollore. Una volta acquisite le situazioni in cui si trovano gli ingressi, collegati al mondo esterno, il microcontrollore può effettuare una serie di controlli, spesso andando a verificare lo stato di un singolo bit, tramite una sequenza di “mascherature” per eliminare, di volta in volta, i bit non influenti ed isolare solo quelli necessari.
Esercitazione 7: Uso di mascherature di controllo
Con la piattaforma TinkerCad realizziamo questo circuito

Si vuole realizzare il seguente funzionamento:
Nella richiesta non sono state prese in esame le altre due possibili combinazioni del 3° e 4° dip-switch, eventualmente si potrebbe prevedere l’ipotesi che il Led Blu sia sempre spento quando i suddetti dip-switch sono entrambi bassi ovvero sempre acceso quando i due dip-switch sono entrambi alti.
Il codice sorgente completo per ottenere questa comportamento lo trovate qui.
Esercitazione 8: Uso del controllo switch()
Con la piattaforma TinkerCad realizziamo questo circuito

Il microcontrollore di Arduino pilota, tramite sette (od otto) uscite un display a 7 segmenti LED. Si vuole realizzare quindi un convertitore binario-decimale con relativo visualizzatore. Come ci siamo accorti ben presto durante la lezione, le combinazioni possibili sul dip-switch a 4 contatti sono 16, ben oltre le dieci combinazioni della numerazione decimale.
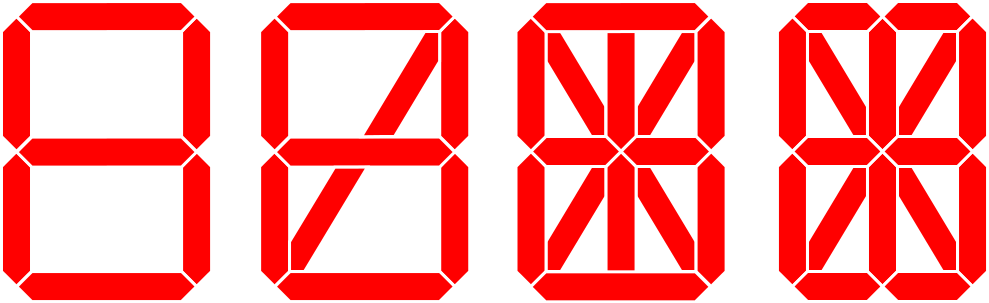
Il display utilizzato ha una struttura come indicato di seguito

Il display da noi utilizzato è però del tipo a catodo comune, quindi tutti e otto i led sono invertiti ed il piedino comune (Common) è collegato a tutti i catodi e pertanto, per poter accendere il segmento, andrà collegato a GND (alimentazione negativa), mentre il pin di uscita di Arduino porterà al singolo segmento il positivo.
I singoli segmenti hanno una sigla indicata con le lettere alfabetiche dalla A fino G, partendo dal segmento in alto e proseguendo in senso orario. Il punto decimale (Decimal Point) è indicato dalla sigla DP.
Mentre è abbastanza ovvio capire quali segmenti vanno accesi per ottenere le combinazioni numeriche da 0 fino a 9 (numerazione decimale), un po’ meno chiaro è cosa fare con le combinazioni da 10 a 15. Utilizzeremo per la visualizzazione sul display la codifica esadecimale, faremo quindi un visualizzatore in base 16. I simboli ,da sempre utilizzati in ambiente elettronico/informatico per visualizzare queste combinazioni, sono le lettere dell’alfabeto dalla A fino alla F.
Per visualizzare questi ulteriori simboli utilizzeremo a volte le lettere maiuscole e a volte le lettere minuscole, poichè questo tipo di display, molto semplice e con pochi piedini è nato ben prima di queste esigenze. Qui sotto potete vedere alcuni esempi di visualizzazione di caratteri alfabetici
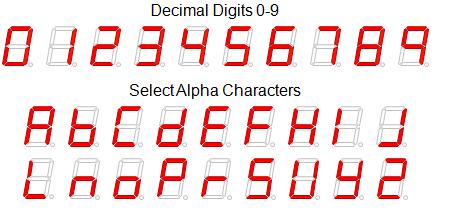
Per la cronaca esistono altri modelli di display che arrivano fino a 14/16 segmenti e che riescono a visualizzare qualsiasi carattere alfabetico.
Il codice sorgente completo per ottenere questa comportamento lo trovate qui.
Riepilogo dei contenuti della lezione:
Alla prossima lezione…
Operazioni di INPUT
In questa seconda lezione passiamo ad analizzare l’altra operazione che permette al microcontrollore che governa Arduino di interagire con il mondo “esterno”.
Si tratta dell’operazione di INPUT. L’operazione viene definita di “ingresso” (input) poichè i dati del mondo esterno “entrano” all’interno del microcontrollore.
A differenza della scorsa lezione si tratta quindi di operazioni di lettura.
Esercitazione 4: Uso di interruttori
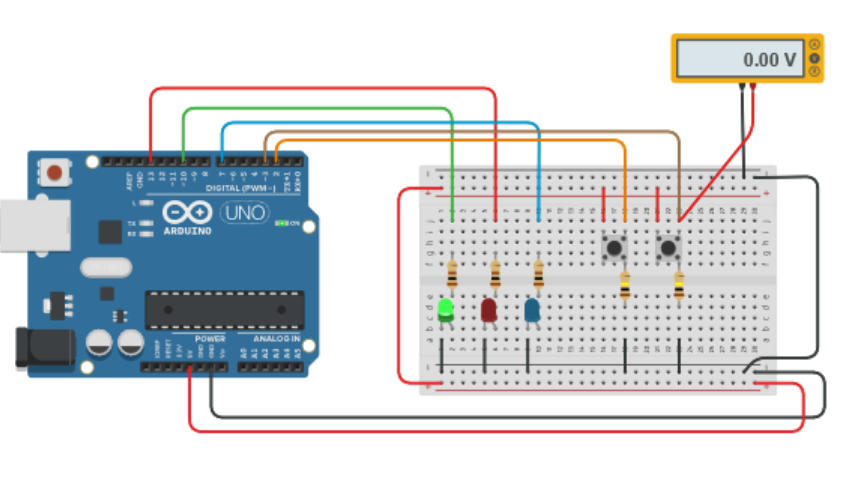
Con la piattaforma TinkerCad realizziamo questo circuito
Quello che si vuole realizzare è un funzionamento di questo tipo:
Il programma è quindi molto facile da realizzare… il codice lo trovate qui.
Scritto quasi ad “occhi chiusi” perchè tanto è semplice… ma, ma… andando in simulazione ci accorgiamo che non funziona. O meglio, qualcosa fa, ma non esattamente quello che volevamo. All’inizio a volte i led sono spenti, ma spesso sono accesi, in ogni caso facendo scorrere la slitta dell’interruttore si accendono e non si spengono più.
Per controllare meglio proviamo a collegare un multimetro, impostato come voltmetro, all’ingresso del microcontrollore. In effetti ci accorgiamo che la tensione passa da 5 volt (alimentazione positiva) a quasi zero, ma non zero, ovvero a poco più di 50 mV. Inoltre l’interruttore su cui abbiamo collegato il voltmetro adesso funziona perfettamente, ossia accende e spenge regolarmente il Led Rosso.
Cosa succede?
Quando spostiamo la slitta dell’interruttore e scolleghiamo il piedino del microcontrollore dalla tensione di +5 volt, il filo connesso al piedino rimane scollegato, libero, ossia non connesso a nessun potenziale elettrico, in gergo si dice che è “flottante”. Un conduttore lasciato libero in aria funziona come da antenna e riesce a captare piccoli segnali elettrici o a mantenere per lungo tempo il potenziale che aveva in precedenza, prima di riuscire a disperderlo. In sostanza in genere si comporta spesso come se fosse collegato ad una sorgente di tensione, in ogni caso il potenziale a cui si pone è assolutamente aleatorio.
Per evitare questo problema ogni conduttore deve essere sempre e comunque legato ad un potenziale alto (alimentazione positiva) o basso (alimentazione negativa o massa). Nel nostro caso possiamo risolvere collegando un resistore da 10 Kohm verso il negativo (resistore di pull-down), riprovando con il medesimo programma di prima vedremo che il problema non si ripresenta e tutto funziona correttamente. Vedremo anche che la tensione sul piedino andrà da +5 volt a 0 volt.

Esercitazione 5 e 6: Uso di pulsanti
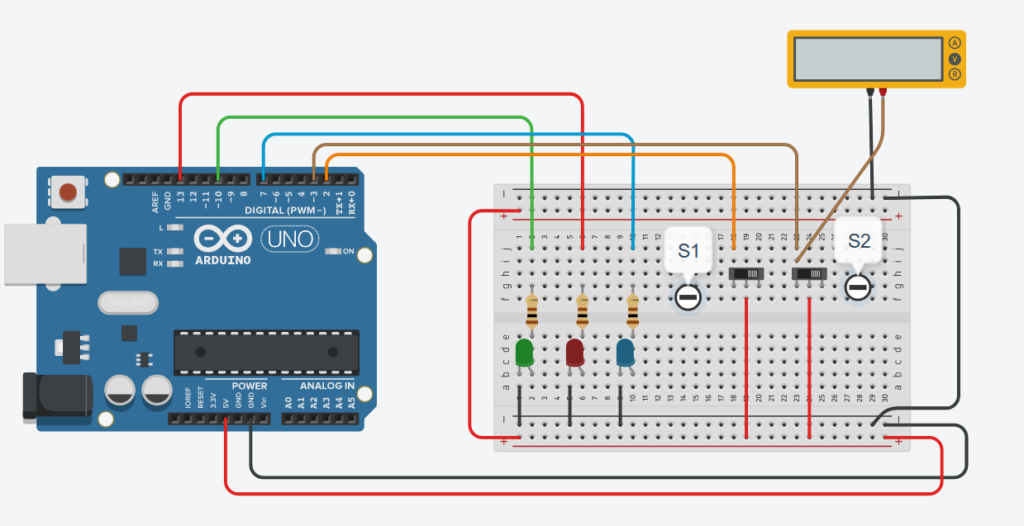
Con la piattaforma TinkerCad realizziamo questo circuito
Memori dell’esperienza precedente questa volta mettiamo subito i resistori di pull-down sul piedino del microcontrollore.
Prima di effettuare i collegamenti occorre puntualizzare il tipo di pulsante da noi utilizzato. In questo tipo di pulsante i quattro terminali sono collegati a coppie: i piedini 1 e 2 sono collegati insieme tra loro, così come i piedini 3 e 4, quando viene premuto il pulsante queste due coppie 1-2 e 3-4 vengono a sua volta collegate fra loro.
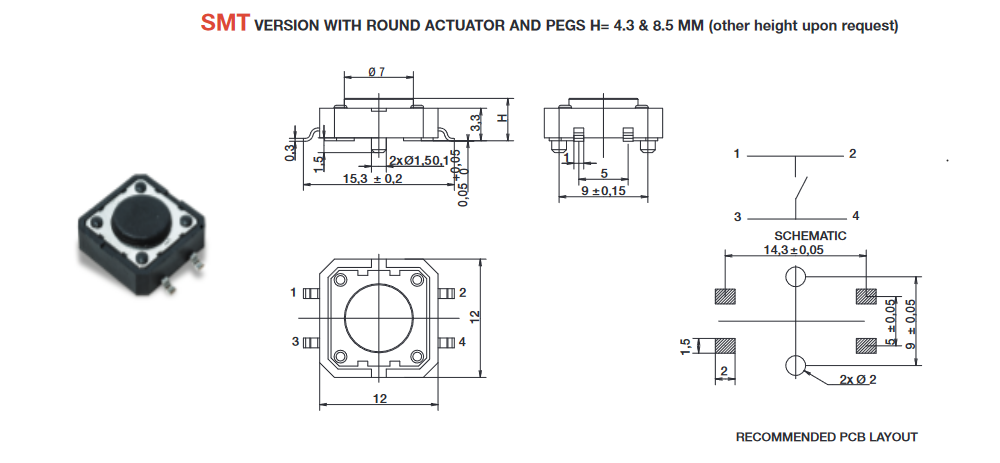
Guardando lo schema realizzato con TinkerCad i piedini sulla sinistra ed etichettati con 1a e 1b costituiscono una coppia, mentre quelli con etichetta 2a e 2b costituiscono l’altra coppia. Per visualizzare l’etichetta basta posizionare il puntatore del mouse sul piedino ed attendere un istante.
La funzione da realizzare richiesta al programma è la seguente:
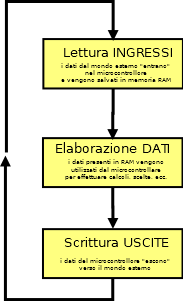
Come abbiamo visto durante la lezione, da adesso in poi converrà strutturare la sequenza del programma in questo modo:
Il programma creato (che trovate qui), che a prima vista non presenta errori, però non si comporta come desiderato. Durante la simulazione a volte la pressione del pulsante fa cambiare di stato al Led associato ma, molto più spesso lo lascia invariato. Nel corso della lezione abbiamo visto che introducendo un certo ritardo nell’esecuzione della funzione loop(), si ottiene un miglioramento, ma il programma non funziona ancora correttamente. Inoltre vi ho già “intimato” di non utilizzare mai l’istruzione delay() poichè essa provoca un blocco totale del microcontrollore (in questo caso per 100 msec) durante il quale esso non fa altro che attendere…
Occorre modificare sostanzialmente il programma, impostandolo in modo che il microcontrollore in ogni momento sappia com’è lo stato di un ingresso, com’era in precedenza e quanto tempo è trascorso dall’ultima variazione di quell’ingresso. La procedura a prima vista potrebbe sembrare un’inutile complicazione, in realtà il tutto si traduce in una maggior sicurezza ed affidabilità del funzionamento, inoltre viene risolto anche un altro problema, quello dei “rimbalzi” a cui ho accennato durante la lezione.
In questo documento potete trovare spiegato l’argomento in maniera più dettagliata. Mentre a questo link trovate il programma definitivo che risolve anche i problemi presentatisi fino ad ora.
All’interno del programma trovate anche un ulteriore quesito. Prossimamente troverete qui sotto la soluzione da me proposta.
Riepilogo dei contenuti della lezione:
Alla prossima lezione…
Operazioni di OUTPUT
Partiamo dalle più semplici operazioni gestibili con un microcontrollore come quello utilizzato nella scheda Arduino.
Esercitazione 1: Lampeggio Verde/Rosso
Con la piattaforma TinkerCad realizziamo questo circuito

Il funzionamento richiesto deve essere il seguente (con temporizzazioni fisse di 0,5 sec ovvero 500 msec):
Il codice completo lo trovate qui (utilizzatelo solo dopo aver provato da soli).
Esercitazione 2: Semaforo semplificato a due vie
Come seconda prova propongo questo circuito
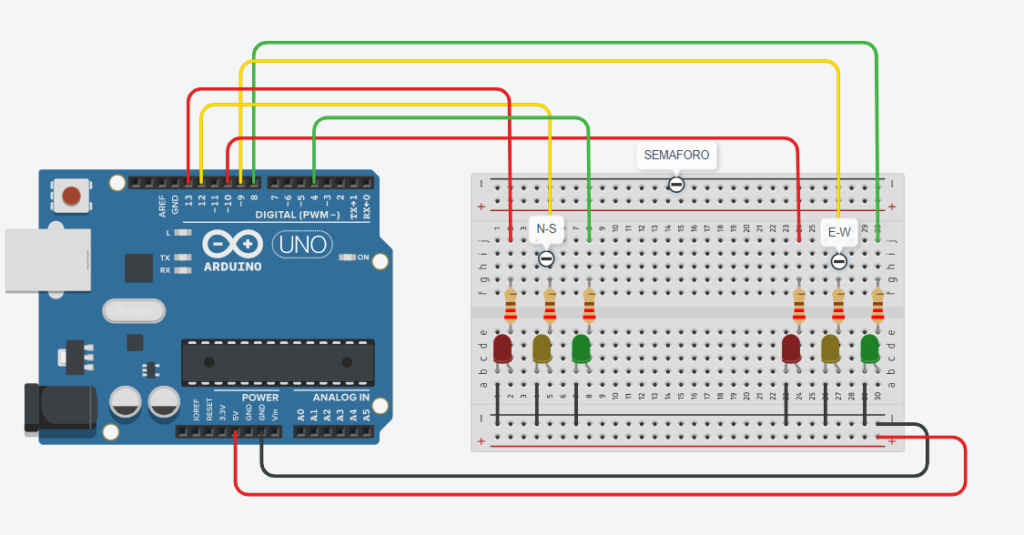
Immaginiamo di dover realizzare la gestione di una sequenza semaforica costituita da due gruppi di luci (rosso/giallo/verde) presenti in un incrocio di due vie. Per semplificare le due direzioni NS (Nord-Sud) e EW (Est-Ovest) hanno le stesse luci a coppie ossia il Rosso Nord si accenderà insieme al Rosso Sud, il Verde Nord insieme al Verde Sud, ecc.
Chiaramente quando nella direzione NS è acceso il colore Verde oppure Giallo, nella direzione ortogonale EW dovrà obbligatoriamente essere acceso il colore Rosso. Per questa ragione prendiamo in considerazione solo le sequenze di accensione dei colori Verde e Giallo, il Rosso opposto sarà acceso di conseguenza.
Le temporizzazioni richieste, inizialmente, sono di 5 secondi per il Verde e di 2 secondi per il Giallo. In seguito verrà chiesto di differenziare la tempistica per una delle due direzioni.
Il funzionamento richiesto è il seguente:
Nota: Le luci non indicate dovranno essere spente in ogni singolo punto, consiglio quindi di pilotare TUTTE le volte TUTTE le uscite, alcune saranno accese mentre altre spente.
Il codice completo lo trovate qui (utilizzatelo solo dopo aver provato da soli).
Esercitazione 3: Lampeggio “Real Time”
Come ultima prova di questa lezione propongo questo circuito

La funzione richiesta questa volta sembra molto semplice:
A prima vista, ripeto, potrebbe sembrare molto semplice da realizzare. In realtà è impossibile (o quasi) da ottenere con le tecniche viste finora, cioè con semplici sequenze lineari di istruzioni. Impossibile no, perchè prendendo il programma della prima esercitazione e modificandolo, con un numero di righe di istruzione circa 4-5 volte più grande si può ottenere il risultato richiesto. Ma se vi dicessi che va aggiunto un terzo Led, lampeggiante anch’esso e magari con un numero di volte che sta in rapporto di numero primo con gli altri ?
Il codice completo lo trovate qui (utilizzatelo solo dopo aver provato da soli).
I più attenti fra voi avranno notato un terzo Led di colore Blù che non è stato citato nel testo e non è utilizzato. A cosa serve? A complicare ancora di più le richieste:
Il codice completo lo trovate qui (utilizzatelo solo dopo aver provato da soli).
Riepilogo dei contenuti della lezione:
Alla prossima lezione…
Queste pagine saranno utilizzate per fornire i materiali necessari per poter seguire il modulo 11.2 Microcontrollori (Arduino) del Corso AUTOMA20 di ITS PRIME, tenuto dal sottoscritto.
A causa delle ormai note ragioni questo modulo si terrà, almeno in questa parte iniziale, con didattica a distanza e, pertanto, utilizzeremo supporti di virtualizzazione delle esercitazioni di laboratorio per poter comprendere meglio la programmazione dei microcontrollori.
Verrà utilizzata la piattaforma TinkerCad (TM) fornita gratuitamente da AutoDesk (TM) sul sito https://www.tinkercad.com.
Qui potete trovare i primi consigli per registrarvi e poter così accedere a questa piattaforma.
Per comprendere i circuiti che verranno di volta in volta realizzati (virtualmente per adesso) occorre sapere che cos’è una BreadBoard.
Corso ITS – AUTOMA20
Gualtiero Lapini
Sarebbe meglio dire “Confettura di LOTI” perché si sa, i colti ed i pignoli direbbero che “marmellata” è solo quella di arance o meglio di agrumi.
Ma noi non siamo né colti, né pignoli, anzi siamo dimolto, ma dimolto ‘gnoranti in Toscana e soprattutto permalosi, quindi evitiamo discussioni.
Questo è il primo tentativo di produzione di siffatto prodotto, ma siccome abbiamo molti Loti (o Cachi) e ci dispiace tanto vederli cadere inutilmente per terra a fine maturazione, quest’anno abbiamo deciso di provare ad utilizzarli.
Come frutto i Loti ci fanno piuttosto “schifo”, sono terribilmente dolci e soprattutto hanno una consistenza a maturazione che è abominevole. Tante persone ci vanno matte, a volte ho provato a mangiarne uno con il cucchiaino… non lo rifaccio più. De gustibus…

Ricavarne una marmellata è molto facile, a parte ovviamente il fatto di tirarli in terra da maturi che è molto ma molto più veloce. La ricetta seguita da noi è comunque molto semplice.
Occorre innanzitutto avere un produttore dei suddetti frutti ovvero un albero di Diòspero (Diospyros kaki), da noi chiamato generalmente Loto (non Kaki o Cachi o Caco per la stretta assonanza con altro genere di prodotto) od un amico che te li procuri.
I frutti devono essere sufficientemente maturi e morbidi ma non “squaqquaraqquà” ovvero si devono tenere in mano dopo averli divisi a metà… vanno privati della buccia esterna, della parte dura del torsolo e vanno fatti a pezzetti, diciamo a cubetti di uno/due centimetri di lato.
Tagliate a cubetti anche una mela, meglio se mela cotogna, che servirà a raddensare la marmellata alla fine della cottura.
Pesateli, quindi buttateli in una capiente pentola ed aggiungete il 30% in peso di zucchero. Portate ad ebollizione a fuoco moderato. Lasciate cuocere, girando di tanto in tanto con un mestolo, per 20 minuti. Togliete quindi la pentola dal fuoco e passate il tutto con un frullatore ad immersione per dare una consistenza abbastanza omogenea al prodotto finale, qualche pezzetto più grosso può anche rimanere. Rimettete quindi la pentola sul fuoco, sempre moderato, per altri 10 minuti.
Nel frattempo avrete messo in forno a 120° per 20-30 minuti i vasetti ed i coperchi per sterilizzarli. Naturalmente li avevamo lavati ed asciugati in precedenza.
Utilizzando guanti o presine di silicone invasate la marmellata ancora calda e chiudete a forza i vasetti. Noi abbiamo lasciato raffreddare i vasetti girati a testa in giù (in questo modo viene sicuramente sterilizzato il bordo di chiusura). Dopo alcuni decine di minuti abbiamo rimesso i vasi diritti, altrimenti la marmellata resta in alto nel vasetto e rimane un antiestetico “vuoto” sul fondo del vasetto che fa tanto “strano”.
I vasetti completamente freddi dovrebbero aver “risucchiato” il tappo verso l’interno e quindi, premendoci sopra con un dito, NON dovrebbero fare il classico “clic-clac” del vasetto non sigillato. Se succede, nessuna preoccupazione, sarà semplicemente il primo vasetto ad essere consumato.

Risultato finale: all’assaggio direi che la marmellata è molto buona, non dolcissima come il kako maturo e, soprattutto, non “squaqquaraqquà” come il frutto mangiato maturo.
La Forrentaia
Gualtiero e Silvana, agricoltori per caso.